
看得远、看得清、看得稳,背后是技术的不断积累。
智能汽车赛道上,最重要的一块战场就是智能辅助驾驶。这个战场上的玩家分成两类,一类是以特斯拉为代表的纯视觉方案,即只用光学摄像头来构建智能驾驶系统;另一派则是主流的多传感器融合,即利用包括摄像头、激光雷达、毫米波雷达等多种传感器融合方案。
其中,激光雷达可以说是多传感器方案中,最重要的元素之一。激光雷达能力的高低,可能直接影响到新能源车智能驾驶水平的高低。
不久前,蔚来发布的新车 ET7 上,搭载了 Aquila 蔚来超感系统,在这套系统中,最重要的一个传感器之一,就是一台超远距高精度激光雷达。而这块混合固态雷达,也是目前智能汽车领域看得最远的一颗激光雷达。
本周,蔚来智能硬件副总裁白剑,详细介绍了这款雷达背后的故事。
以下为白剑自述文字素材:
看得远、看得清、看得稳
ET7 搭载了 Aquila 蔚来超感系统,配备 33 个高性能感知硬件,其中包括 1 个超远距高精度激光雷达,7 个 800 万像素高清摄像头、4 个 300 万像素高感光环视专用摄像头、1 个增强主驾感知、5 个毫米波雷达、12 个超声波传感器、2 个高精度定位单元和 V2X 车路协同。实现融合感知,定义了量产车自动驾驶感知系统的全新标准。

当然它也有今天的主角,那就是一个 1550nm 超远距离高精度激光雷达,这颗激光雷达是截至今天量产的探测距离最远的激光雷达,他也是世界上第一款已经量产的 1550nm 激光雷达。
ET7 搭载的激光雷达的一些具体的指标,首先他最重要的也是想 highlight 的指标就是探测距离,这里面我们提到最远的探测距离我们甚至可以到 500 米,这是市面上激光雷达中探测距离最远的。
另外它还有几个特色,首先是 1550nm,大家知道激光雷达要看得远,他的技术体系是很重要的,1550nm 由于他能够支持大功率的发射,所以这也就是为什么我们这款激光雷达探测距离远一个核心关键的要素之一。
另外一个就是激光雷达看得要广,水平视角 120 度,基本上主雷达现在都是这个水平。另外一个就是我们的分辨率,我们的定睛凝视 ROI 达到了 0.06 度乘以 0.06 度的分辨率,是业界排名最好的。
激光雷达有三个非常关键的指标,分别是看得远、看得清、看得稳,说到看得清,我们就要提一个分辨率指标,什么意思呢?大家可以看到激光雷达输出的东西跟摄像头有点像,是一帧帧的图象,只不过激光雷达的图象每个点都带有深度信息,深度信息就是每个点到我们这边,就是发射端这一块有多远,所以他是图象我们或者叫 3D 图象,3D 图象归根到底也是个图象,要识别一个物体,那么这个物体他被用多少个像素点去表征,那么他就是一个分辨率的这么一个概念。
如果说相同大小的物体,我能够表征的点数越多,那就是分辨率越高,也就是我们描绘这个物体描绘的更加细致,那自然就很清,这就像一个手机屏幕一样,分辨率越高,同样一张图你就会看到它的细节就更细腻、更清楚。这点图象和激光雷达其实是一样的,在这张图上我们可以给大家做一个对比,假定左边有一个,他的分辨率是 0.1°乘以 0.2°的雷达,在这里跟大家简单解释一下,0.1°H 代表的是水平方向 0.1°,什么意思呢?
就是每个 0.1°就有一个点,如果说是 120°的视野,每一度里面有 10 个点,总共用 120°,所以说一个水平线上有 1200 个点,每一帧图象里面水平有 1200 个点,那么 0.2°的 V 指的是垂直的分辨率,那么他是 0.2°,也就是说一度垂直的空间会有 5 个点,如果说 25°的垂直分辨率,那么就是 25 乘以 5,就是 125 个点,或者是我们经常说的 125 线或者 100 线激光雷达其实是跟这个有关系的。像我们这个 0.2°的 V,就是这个例子当中我们可以叫他是一个 125 线的激光雷达。
我们可以看到这么一个分辨率,对于一个 1.8 米的行人,在 200 米处,注意,这个科学是很严谨的,所有这些指标或者一些特征,都必须要有很多的定语或者说测试条件,否则的话他的数据对比就不是那么的精确和准确了。
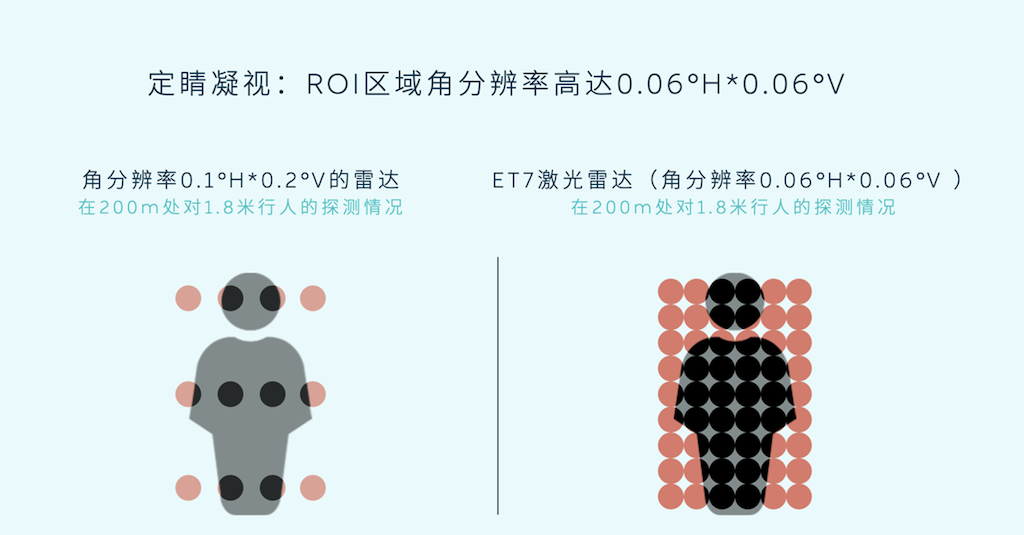
说回来,200 米处 1.8 米高的一个行人,大家可以看到对于左边这款激光雷达我们有 12 个点来去照在他身上,去描述这个物体。ET7 的这款激光雷达是怎么一样表征形式呢?刚才我也提到了说我们在定睛凝视,就是 ROI,我们是 0.06°乘以 0.06°的这么一个分辨率,可以看到是一个密密麻麻的,同样还是 200 处 1.8 米高的行人,我们有多少点去表征或者描绘这个行人的外观呢?
大家可以看到横向有 6 个,竖向有 9 个,有 54 个点,这个分辨率比起左边这款激光雷达有将近四五倍的提升。这样描绘出来的人肯定是更容易被算法识别,而且细节也可以识别得更加准确。这是我们所谓的看得清。
刚才我提到说激光雷达三大重要的指标,看得远、看得清、看得稳,看得稳这个指标其实业界提的比较少,非常专业。
首先,我刚才已经介绍过激光雷达有看得远,也分辨率,分辨率就是每一帧里面有多少个点来去描绘这个点云信息,比如说这张图上面最左边的这个,非常理想的激光雷达,举个例子,假定在这个区域里面有九个点,就是这个区域里面理想的激光雷达从理论上讲是有九个点的分辨率,每一帧我就输出九个点的点云信息就好了,但是理想很丰满,现实很骨感,这个东西从工程角度上是很难实现的。
我给大家举个例子,比如说屏幕,屏幕技术现在已经发展了这么多年了,大家现在用的这个手机屏幕、电视屏幕,大家可能不知道,其实都是有坏点的,就是你买的这个手机或者买的屏幕不可能像素上面,比如假黑屏或者说 1080P 的屏幕上,每一个像素都是好的,这是绝对不可能的,做不到的,或者说做到了那也是天价的屏幕,但是有一些技术把这些坏点补偿掉了,摄像头也是一样,我做摄像头也很多年了,不可能我们使用的摄像头上面每一个像素都是好的,其实激光雷达也是一样的,但是他不是一个固定的坏点,我有时候跟我们的工程师交流,我有一个形象的比喻,就有点像我们买房子,叫建筑面积和使用面积一说的。
比如说,什么是建筑面积呢?我有一个激光雷达,这个激光雷达我们标成是每一帧有十万个点云,那么这个就是建筑面积,就是理论上讲每一帧你都可以传回十万个点的信息给我们的接受系统。那么什么是使用面积呢?刚才上面那张图上,我给大家介绍过激光雷达的工作原理,就是一束激光打到空间的障碍物上然后反射回来。那么反射回来这个点他不是每一个点都能够被准确的接收。
他跟整个系统,比如说他的能量,他跟反射回来以后,这个探测的接收的灵敏度,还有整个系统的稳定度,这都有关系。那如果说,比如说刚才说的十万个点这一帧,出去扫描,扫描回来如果说只有九万个点回来,那么另外的一万个点,他由于系统的稳定性,或者说他信号太弱,就没有探测到。那么这样的话,我们实际上只得到了九万个点,这个就是探测概率,我们把他叫做 90%,或者说得房率 90%。
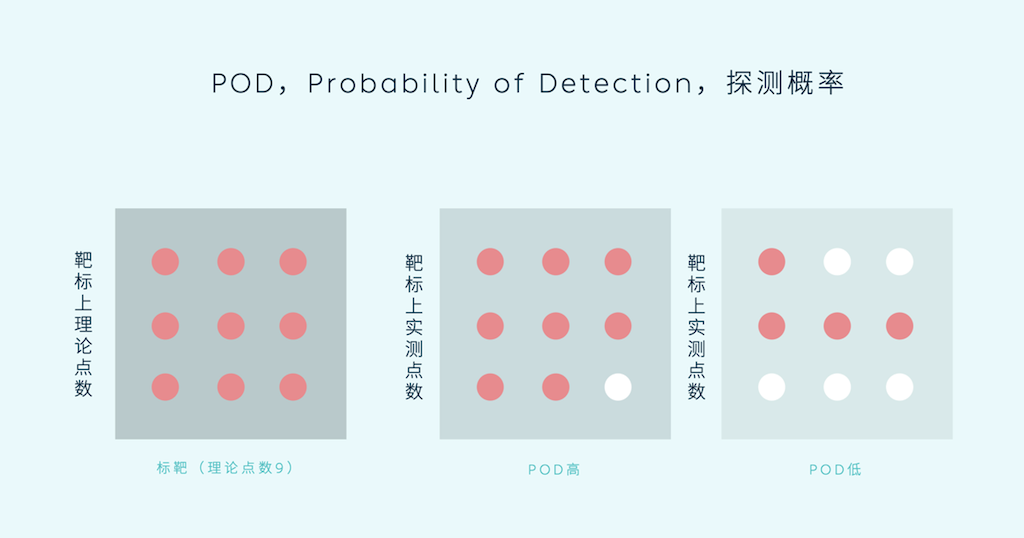
如果是 POD 低的这种,就是十万个点发射出去,可能只有一半的点被探测回来,那么我们把他叫做 POD 50%。其他的指标,比如说探测距离、分辨率都一样的情况下,大家可以想这个问题,POD 越高的值,那么他实际上的得房率,就是实际所得的点云就越多。那么他去对同一个物体,用来描绘这个物体的点数,他当然也就更多了。
那么这个的 POD 就高。也就是得房率高。所以大家都有一个朴素的认识,建筑面积相同的房子,当然是得房率越高的房子住起来舒服。在激光雷达上其实也是一样的。我们这款激光雷达的 POD 可以到业界最好的 90%。很多的激光雷达是远低于这个水平的。
联合打造先进激光雷达系统
蔚来整个的自动驾驶系统,做了很多的东西,包括全栈自研的软件算法,包括全栈自研的软件、硬件、操作系统,以及传感器系统,包括激光雷达。这体现了我们蔚来的理念:每一点安全提升,都值得全力以赴。
我相信所有的朋友们看到 ET7 以后,都会觉得真的很漂亮。但实际上,大家知道,头顶上放这个激光雷达,要把他做到好看,本身是一件非常难的事情。今天,我们看结果非常的好,做到了科技与美完美的融合。然后我们也得到了 0.208 的超低风阻系数。大家请注意一下这个图上我们激光雷达的弧度,不管是从哪个角度看都是很和谐的。

有一句说法,在战斗机行业里面说「长的非常漂亮的战斗机,它的空气动力水平一定是非常高」。在我们的车上其实是一样的,大家可以看到,我们的这款激光雷达在我们车上的布局,整个的弧线是非常优美的。我们的外观设计调过非常多次,我们的空气动力学实验室,也是做了很多的仿真应用。最终获得了一个非常好的曲线的要求,我们和图达通的联合开发团队是基于这个去设计我们激光雷达的外观,还有内部结构。
激光雷达是要上车的,车是一个安全性要求很高,同时也要求非常精密,可靠性要求非常高的商品。那么任何一个零部件,包括激光雷达要想上车,它要经过九九八十一难,要经过很多的考验,才能够允许它上车。那么我给大家讲几个例子,让大家体会一下有多么的困难。
首先,跟大家讲一下冲击测试。冲击测试的原理是模拟我们在用车过程中的各种极端用车场景,日常用车不会只在平坦的公路,有时候会去一些乡间小路或泥泞道路,甚至搓衣板路,非常颠簸。那我们就必须要去保证我们所有的 ECU 和零部件包括激光雷达,能够在车的十多年的生命周期里能够耐得住这样的环境。
所以,汽车行业专门有一个测试叫冲击测试,就是测这个能力。冲击测试就是给这些 ECU 一个高达 50 个 G 的加速度,然后去看在这么大的冲击的情况之下会不会损坏。那么 50 个 G 是什么概念呢?电梯运行的时候会有一些失重的感觉,大概也就一两个 G。那么飞行员是我们人类承受冲击的翘楚了,他们大概承受的是 8 个 G。可是我们这个激光雷达包括其他 ECU 要承受 50 个 G 的冲击,而且不能坏,它才能够满足测试的需求,可想而知,它的难度有多大。
除了这些冲击测试,还有冷热测试。汽车的使用环境是非常多变的。在咱们国家,极北可以到漠河,最南可以到海南岛,那么它的工作的条件,低温低到零下 40 度,高温的话,有的时候几十度,加上它自身的温度上百度,都是有可能的。所以,冷热测试是比不可少的。有些时候还要进行交替,冷热交替的冲击,模拟的是夏天开空调,停空调等等场景。这些测试我们的激光雷达统统都要经过。除了冷热,刚才也提到了,我们还要高温耐久,还要做光照。

除了车上的 ECU 的标准的可靠性的测试之外,我们的激光雷达还有他独特的测试。因为激光雷达是一个传感器,我们必须要保证这个传感器,在各种条件下能够持续进行工作,比如说强光,这个时候太阳光上也有红外线,会对激光雷达产生干扰。那么强光下工作的好不好?异物还有灰尘?这些场景下我们都经过严格的测试,要确保这款激光雷达能够耐得住这些严格的场景,能够正常工作,才能够让他量产及上车。
从开发,到准备好,到量产,还有一个工业化的过程。特别这两年蔚来汽车,像我们这些做硬件的,不是在保供的过程中,就是在进行保供的路上,这个确实是心路历程。同时,激光雷达是一个非常复杂的(MCU)。里面也有很多的零部件,上百个零部件。电路有几百个芯片和其他的元器件。
这些东西要让他生产出来,需要非常强大的供电及工厂产线。同时,要保证制程生产一台、一万台、一百万台甚至几百万台的一致性、可靠性都是没有问题的。蔚来的工业化团队是非常强大的,我们跟图达通的工业化团队一起创造。


