
开源飞控是建立在开源思想基础上的自主飞行控制器项目,Pixhawk开源飞控具有丰富的学习资料,自定义功能开发,使用功能丰富,趣味性强,它同时包含开源软件和开源硬件,而软件则包含飞控硬件中的固件和地面站软件。
开源飞控简介
开源飞控是建立在开源思想基础上的自主飞行控制器项目,Pixhawk开源飞控具有丰富的学习资料,自定义功能开发,使用功能丰富,趣味性强,它同时包含开源软件和开源硬件,而软件则包含飞控硬件中的固件和地面站软件。
丰富的传感器接口,使开源飞控具有在不同使用场景下有不同的传感器设备支持和自定义开发。
随着开源飞控系统的不断发展,从第一代Pixhawk开源飞控发展至今,开源飞控已经拥有完善的开源硬件、开发环境和社区论坛,采用全集成的硬件架构,对多处硬件做出了改进,包括主控处理器;加速度计、陀螺仪和磁力计组合惯性测量单元(IMU)。
飞控是一架无人机的核心,但是,如果没有其他外部设备的辅助,随着使用场景的变化,无人机也无法正常飞行。
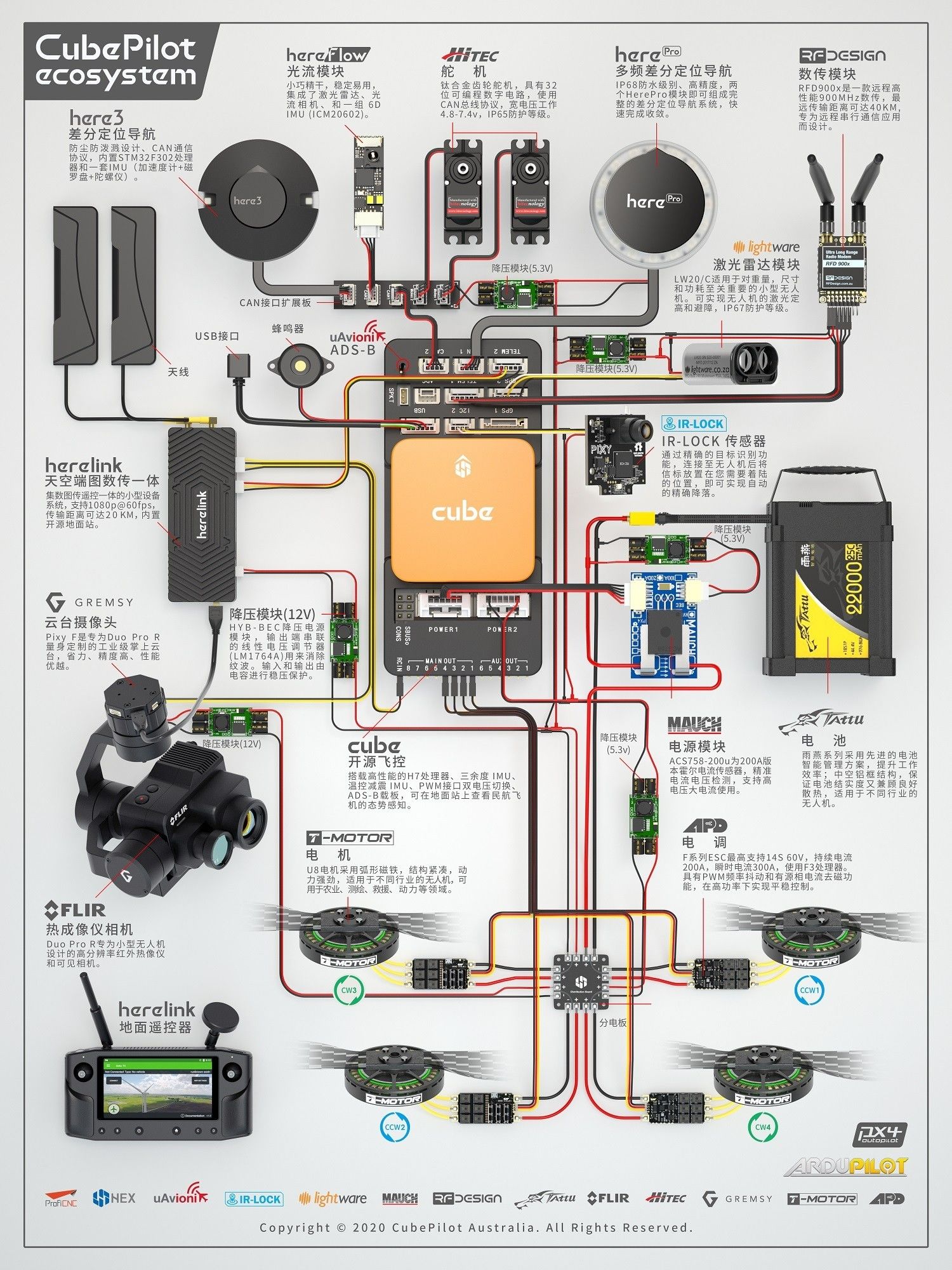
以下连接图系统中展示了无人机飞控常用的硬件设备连接,并阐述了每一个部件的使用功能。可以实现平稳自主飞行、高精度定位、地面站调参、数据和视频传输、自主避障、室内定位、精准降落等飞行功能。

cube 开源飞控设备连接图
设备模块介绍
cube开源飞控:搭载高性能的STM32H753主处理器和STM32F100协处理器芯片,有着高速数据运算能力,扩展丰富的传感器接口,可以在不同的场景下,连接相应传感器,为飞行提供更多选择和应用。飞控使用开源固件可以支持多种机型,有:无人车、无人船、多旋翼、固定翼、垂直起降固定翼、直升机、潜水艇。支持全自主航线、关键点围绕、鼠标引导、FollowMe、自主调参等高级飞行模式。双冗余电源接口,电源模块5.3V供电。
USB:可为飞控烧录固件和调参。
蜂鸣器:发出不同的提示音组合,提示飞控当前的状态。
高精度多频差分定位导航GPS:使用CAN接口通信,设备分为基站和移动站,采用载波相位动态实时差分技术,即RTK技术(Real - time kinematic),实时提供观测点的三维坐标,将基准站采集的载波相位发送给用户站进行求差解算坐标,即用户站接收GPS卫星的载波相位与来自基准站的载波相位组成相位差分观测值进行实时处理,并给出厘米级定位精度,大大提高无人机在执行任务时的精准飞行。(Here3供电为5.3V,HerePro外接供电为5.3-40V最高兼容60V)
光流定位模块:使用CAN接口通信,集成激光雷达,光流相机和6D IMU(ICM20602),激光雷达用于更好的高度检测和精准降落检测,配合光流相机进行X,Y运动轴捕捉和6D IMU用于姿态角检测,进而组成完整的光流定位系统,可用于无GPS情况下的位置定位。5.3V供电。
CAN舵机:选择设备模块,通常可用于一些使用设备的固定装置、投放装置和机械手臂等。
数传模块:用于飞控与地面站通信,作为数据传输和控制的一种方式,作为远程串行通信设备,最远传输距离可达40KM,5.3V供电。
Herelink图数传遥控一体设备:具有数据传输,视频回传,地面站调参和控制, 遥控器控制等功能,使多路复杂的设备集成化小型化,可以输入两路高清视频,传输距离可达20KM。6-12.6V供电。
云台、相机设备:使用相机云台时,无人机飞行过程中,相机云台可为相机增加稳定效果,使高清相机的回传视频稳定而清晰,云台和相机可根据机架类型机架大小而决定,相机可以使用高清相机和红外相机等。云台供电12V。
激光雷达模块:可以连接飞控的串口或I2C通信,可以实现无人机精准的激光定高和避障,5.3V供电。
IR-LOCK精准降落模块:分为红外锁定传感器和红外信标,红外锁定传感器连接至飞控的I2C接口通信,把红外锁定传感器安装在无人机底部中间位置,镜头朝向地面,把红外信标放置于降落位置,在LAND降落模式下,红外锁定传感器会检测地面的红外信标,并做到精准着陆。5V供电。
动力电池:电池是无人机中所有设备的供能来源,所以选择一块好的,稳定的电池是必要条件,在实际飞行过程中它按多少的倍率放电,主要取决于电调和电机的功率和其他负载的电流消耗。最好是选择正规品牌电池,可以保证电池储电性能、放电性能和散热性能。
电源模块:电源模块主要用于精准的电流电压检测,可以在地面站上实时查看电池的电流电压情况,根据无人机使用的电池电压大小不同,相应的电源模块也应选择合适的电压大小。
降压模块:主要将大电压转换为小电压,给飞行系统中其他低电压设备供电,连接图中的转换电压为5.3V或12V。
无刷电调:全称电子调速器,它根据控制信号来调节电机的启动、停止和转速,电调上都会标出它最高的使用电流,例如:200A,14S(使用电压),通常根据电机的KV值大小和功率来选择电调。
无刷电机,桨叶:无刷电机主要由定子和转子组成,电机其主要参数有xxxxKV,xxxx,例如:8727,150KV,8727代表定子尺寸为87mm X 27mm (电机转子的直径 X 电机转子的高度),150KV值:电机的转速(空载)=KV值X电压;例如KV150的电机在50V电压下它的转速(空载)就是7500转/分钟。无刷电机主要优点就是高效,稳定,使用寿命长。电机在整个飞行系统中起到提供动能的作用,桨叶是将电机转动的功率转化为动力的装置。在整个飞行系统中,桨叶主要起到提供飞行所需的动能,桨叶按材质一般可分为尼龙桨,碳纤维桨和木桨等。电调电机桨叶都是互为搭配,需根据使用场景和使用要求选型。
目前的开源飞控系统在软件、人工智能以及云应用方面进行革新。有高精度定位、集群飞行、图像识别、自主避障、自动跟踪飞行等高级飞行功能,向机器视觉、集群化、开发过程平台化的方向发展。
开源飞控的发展集合了数百上千个优秀开发者的智慧,这才能在短短的几年时间内开发出功能如此强大的产品,虽然往后开源飞控会以不同的方式发展,但是我相信会有更好的明天在等待着我们去探索,这是许许多多飞控爱好者们的共同愿景。在人工智能技术、图像识别技术飞快发展的今天,开源飞控也会紧跟步伐向更智能的时代发展。有所期待,有所热爱。


